

步進(jìn)電機(jī)驅(qū)動器細(xì)分是利用勵磁電流分步進(jìn)行的原理。讓電機(jī)固有的步距角階梯運行。 1細(xì)分為原有步矩角1.8度(這是2相最常規(guī)的,還有0.9等等)。 2細(xì)分就是0.9度,以此類推。
以兩相步進(jìn)電機(jī)為例,零細(xì)分時,一步電機(jī)軸轉(zhuǎn)動1.8°,在16細(xì)分是16步電機(jī)軸轉(zhuǎn)動1.8°在步進(jìn)電機(jī)驅(qū)動電路中,我們需要去關(guān)注它的驅(qū)動能力、控制精度、內(nèi)阻大小、工作電壓、封裝尺寸、噪音和驅(qū)動響應(yīng)速度等參數(shù)。
以山社步進(jìn)電機(jī)驅(qū)動器MD-2322為例:
?電源電壓:8-32VDC
?輸出電流:撥碼開關(guān)設(shè)定,16種選擇,最大2.2A(峰值)
?電流控制:PI 電流控制算法,高速大力矩輸出,低震動,低噪音,低發(fā)熱
?細(xì)分設(shè)置:撥碼開關(guān)設(shè)定,16種選擇
?速度范圍:選配合適的步進(jìn)電機(jī),最高可達(dá)3000rpm
?共振抑制:自動計算共振點,抑制中頻振動
?系統(tǒng)自測:驅(qū)動器上電初始化自動檢測電機(jī)參數(shù)并由此優(yōu)化電機(jī)電流算法和抗共振電子阻尼系數(shù)
?控制方式:脈沖&方向模式(默認(rèn))雙脈沖、受控自運行、持續(xù)自運行內(nèi)置跳線可選
MD-2322細(xì)分設(shè)定:
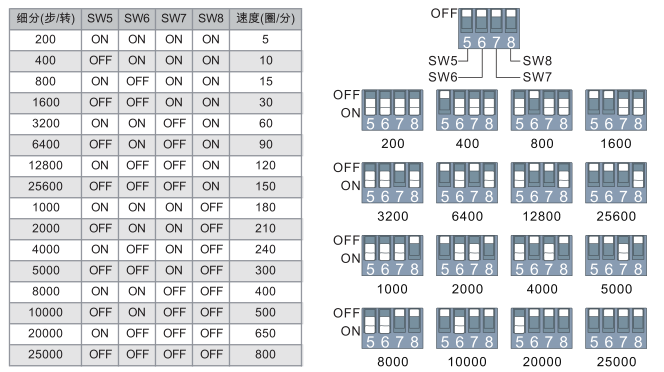
細(xì)分?jǐn)?shù)就是指步進(jìn)電機(jī)運行時的真正步距角是固有步距角(整步)的幾分指一。以MD-2322的200細(xì)分為例:驅(qū)動器工作在200細(xì)分狀態(tài)時,其步距角只為‘電機(jī)固有步距角’的兩百分之一,也就是說:當(dāng)驅(qū)動器工作在不細(xì)分的整步狀態(tài)時,控制系統(tǒng)每發(fā)一個步進(jìn)脈沖,電機(jī)轉(zhuǎn)動1.8°;而用細(xì)分驅(qū)動器工作在200細(xì)分狀態(tài)時,電機(jī)只轉(zhuǎn)動了0.009° ,這就是細(xì)分的基本概念。
