EtherNet/IP總線驅(qū)動器通信規(guī)格及主機(jī)設(shè)置示例
本文適用于鳴志(moons)STF05-IP、STF10-IP、SSDC05-IP、SSDC10-IP等總線驅(qū)動器型號。
EtherNet/IP通信規(guī)格
|
連接接口 |
RJ-45 * 2 |
標(biāo)準(zhǔn)的雙以太網(wǎng)口 |
|
傳輸速率 |
100Mbps |
百兆傳輸速率 |
|
支持功能 連接類型 |
Class1 |
useful for high bandwidth tasks such as monitoring specific functions of the drive 隱式報(bào)文通信用,實(shí)時(shí)性高,周期通信 |
|
Class3 |
顯式報(bào)文通信用,客戶端發(fā)送指令,建立請求設(shè)備和應(yīng)答設(shè)備之間的連接,連接會一直保持,直到主動發(fā)指令關(guān)閉 |
|
|
UCCM |
Unconnect Message Manager 顯示報(bào)文通信用,請求設(shè)備和應(yīng)答設(shè)備之間不組成連接,效率高,但是可靠性低 |
|
|
通信周期(RPI) |
|
|
|
觸發(fā) |
Cyclic |
|
EtherNet/IP2.0
為什么會有EIP V1和V2兩個(gè)版本?
1. 早期版本,只支持ST和STA05型號的驅(qū)動器
2. EIP V1支持顯示消息和隱性消息,但是沒有outputassembly
3. EIP V1沒有完全通過ODVA測試
4. EIP V2完美的解決了上述問題,并且優(yōu)化了功能;EIP V2完全兼容EIP V1的產(chǎn)品
EIP V1和EIP V2的區(qū)別
隱式報(bào)文(Implicit Message)(Class1)
隱式報(bào)文通訊:周期性的執(zhí)行數(shù)據(jù)通訊,一般適用于傳輸對時(shí)間有苛求的數(shù)據(jù)。隱式報(bào)文數(shù)據(jù)一般通過Class1連接傳輸。
Class1連接時(shí),包含的對象如下:
|
對象Object ID |
功能 Function |
詳細(xì)解釋 Notes |
|
|
Hex |
Decimal |
||
|
0x64 |
100 |
Input Assembly(EIP V1) |
監(jiān)控驅(qū)動器的狀態(tài)等EIP V1 |
|
0x65 |
101 |
Input Assembly (EIP V2) |
監(jiān)控驅(qū)動器的狀態(tài)等EIP V2 |
|
0x66 |
102 |
Configuration |
配置通信參數(shù),例如RPI,數(shù)據(jù)長度等 |
|
0x67 |
103 |
Heartbeat Input Only Assembly |
心跳報(bào)文,表明驅(qū)動器處于在線狀態(tài) |
|
0x68 |
104 |
Heartbeat Listen Only Assembly |
心跳報(bào)文,表面主機(jī)處于在線狀態(tài) |
Input Assembly(0x64)
EIP V1對應(yīng)0x64(100),SIZE=30bytes
EIP V2對應(yīng)0x65(101),SIZE=56bytes
|
元素 Element |
各元素的描述 Field Descriptor |
Length (bytes) EIP V1 |
Length (bytes) EIP V2 |
單位 Units |
|
0 |
狀態(tài)字Status Word (SC) |
4 |
4 |
|
|
1 |
報(bào)警代碼Alarm Code (AL) |
2 |
4 |
|
|
2 |
供電電壓 Supply Voltage |
2 |
4 |
0.1VDC |
|
3 |
實(shí)際電流 Actual Current (IC) |
2 |
4 |
mA |
|
4 |
驅(qū)動器溫度 Drive Temperature (IT) |
2 |
4 |
0.1 deg C |
|
5 |
編碼器位置 Encoder Position(EP) |
4 |
4 |
counts |
|
6 |
絕對位置 Absolute Position (SP) |
4 |
4 |
counts |
|
7 |
實(shí)際速度 Actual Velocity (IV) |
2 |
4 |
rev/s *240 |
|
8 |
輸入狀態(tài) Input Status(extended)(IS) |
2 |
4 |
|
|
9 |
輸入狀態(tài) Input Status(mainboard)(ISX) |
2 |
4 |
|
|
10 |
輸出狀態(tài) Output Status (IO) |
2 |
4 |
|
|
11 |
(Reserved) |
未對應(yīng) |
4 |
|
|
12 |
Analog In1 (0=min V,16383=max V) |
未對應(yīng) |
4 |
ADC counts |
|
13 |
Analog In2 (0=min V,16383=max V) |
未對應(yīng) |
4 |
ADC counts |
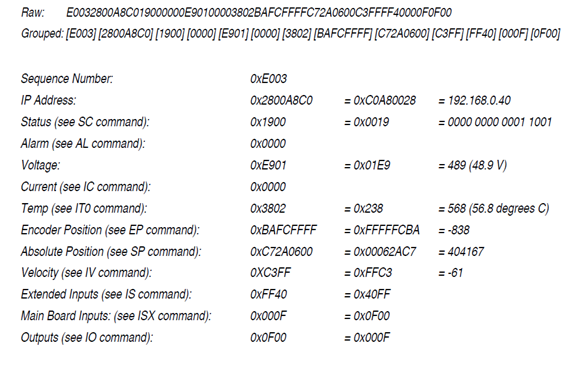
注意:所有數(shù)據(jù)都是按照小端字節(jié)格式發(fā)送(Little Endian),數(shù)據(jù)需要進(jìn)行轉(zhuǎn)換
轉(zhuǎn)換如下(以IP地址為例)
驅(qū)動器的IP地址 : 192.168.0.40
轉(zhuǎn)換成ASCII :C0 A8 00 28
進(jìn)行轉(zhuǎn)換:2800 A8 28
舉例:一個(gè)完整的消息數(shù)據(jù)包解析(EIP V2):
Output Assembly(0x70)
只有EIP V2才有output對應(yīng)。SIZE=64bytes
|
元素 Element |
各元素的描述 Field Descriptor |
Length (bytes) EIP V2 |
單位 Units |
|
0 |
命令字Command Word |
4 |
|
|
1 |
點(diǎn)動速度Jog Speed (JS) |
4 |
0.25rev/min |
|
2 |
點(diǎn)動加速度Jog Accel (JA) |
4 |
10 rev/s/s |
|
3 |
點(diǎn)動減速度JogDecel (JL) |
4 |
10 rev/s/s |
|
4 |
定位速度 Velocity(VE) |
4 |
0.25rev/m |
|
5 |
加速度 Acceleration (AC) |
4 |
10rev/s/s |
|
6 |
減速度 Deceleration(DE) |
4 |
10rev/s/s |
|
7 |
目標(biāo)位置 Distance (DI) |
4 |
Steps |
|
8 |
電流命令Current Command(Only Servo and Step Servo) |
4 |
0.01A |
|
9 |
SCL Command Letters |
4 |
ASCII |
|
10 |
DATA/ SCL Register1 |
4 |
|
|
11 |
DATA/ SCL Register2 |
4 |
|
|
12 |
(Reserved) |
4 |
|
|
13 |
(Reserved) |
4 |
|
|
14 |
(Reserved) |
4 |
|
|
15 |
(Reserved) |
4 |
|
命令字Command Word:賦不同的值,執(zhí)行不同的操作
|
位 BIT |
數(shù)值 Command Value |
詳細(xì)描述 Description |
|
0 |
0x0 |
Idle State,發(fā)送下一次重復(fù)命令時(shí),發(fā)送0x0 |
|
1 |
0x2 |
驅(qū)動器使能Enable |
|
2 |
0x4 |
驅(qū)動器去使能Disable |
|
3 |
0x8 |
啟動相對定位FL |
|
4 |
0x10 |
啟動絕對定位FP |
|
5 |
0x20 |
啟動定位FS |
|
6 |
0x40 |
啟動定位FD |
|
7 |
0x80 |
啟動定位FY |
|
8 |
0x100 |
啟動定位FM |
|
9 |
0x200 |
啟動定位FO |
|
10 |
0x400 |
啟動定位FC |
|
11 |
0x800 |
啟動回零SH |
|
12 |
0x1000 |
啟動FH |
|
13 |
0x2000 |
啟動FE |
|
14 |
0x4000 |
停止Stop/Kill-AM, 以最大加速度停止 |
|
15 |
0x8000 |
停止Stop/Kill-DE,以設(shè)定的加減速停止 |
|
16 |
0x10000 |
開始點(diǎn)動Start Jogging |
|
17 |
0x20000 |
更新點(diǎn)動速度Updata Jog Speed |
|
18 |
0x40000 |
發(fā)送主機(jī)命令 Send Host Command |
|
19 |
0x80000 |
執(zhí)行Q程序Q Load & Execute(QX) |
|
20 |
0x100000 |
錯(cuò)誤復(fù)位Alarm Reset-AR |
例子Sample Moves
使能操作Motor Enable
1. Assemblyelement0:命令字Command Word=0x2
2. Assemblyelement0:Command Word=0x0(Idle State)
1. Assemblyelement0:命令字Command Word=0x4
2. Assemblyelement0:Command Word=0x0(Idle State)
相對定位/絕對定位Motor Move(FP/FL)
1. Assemblyelement4:設(shè)置速度Velocity
2. Assemblyelement5:設(shè)置加速度Acceleration、
3. Assemblyelement6:設(shè)置減速度Deceleration
4. Assemblyelement7:設(shè)置距離Distance
5. Assemblyelement0:執(zhí)行相對定位:Command Word=0x8,或者執(zhí)行絕對定位Command Word=0x10
6. Assemblyelement0:停止Command Word=0x4000(或者0x8000)
7. Assemblyelement0:Command Word=0x0(Idle State)
執(zhí)行Q程序段Q Load&Execute(QX)
1. Assemblyelement10:設(shè)定要執(zhí)行的程序段編號
2. Assemblyelement0:執(zhí)行Q程序,Command Word=0x80000
3. Assemblyelement0:Command Word=0x0(Idle State)
錯(cuò)誤復(fù)位Alarm Reset
1. Assemblyelement0:執(zhí)行錯(cuò)誤復(fù)位Command Word=0x100000
2. Assemblyelement0:Command Word=0x0(Idle State)
執(zhí)行主機(jī)命令Host Command
1. Assemblyelement9:SCL Command-以ASCII形式保存再低16bit
2. Assemblyelement10:主機(jī)命令相關(guān)的參數(shù)1,Data/SCL Register1
3. Assemblyelement11:主機(jī)命令相關(guān)的參數(shù)2,Data/SCL Register2
主機(jī)命令 Implicit Host Commands
顯性消息Explicit Message
鳴志驅(qū)動器支持兩種顯性報(bào)文格式:Type1&Type2;他們都支持通過Class3和UCCM連接;兩種報(bào)文都有消息響應(yīng)。
|
類型Type |
特性Features |
|
Type1 Message |
1. 包含了大部分的SCL的buffer指令; 2. 與outputassembly有大量重疊 3. 不支持查詢 4. 立即指令無法封裝到Type1message |
|
Type2 Message |
1. 支持立即指令 2. 唯一的方式查詢節(jié)點(diǎn)數(shù)據(jù)(如果不是通過outputassembly) |
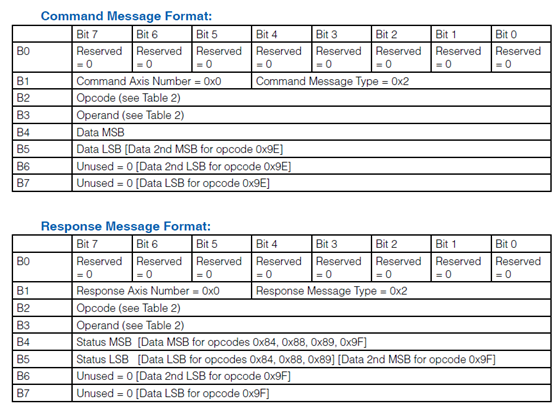
Type1 Message Format
報(bào)文格式:
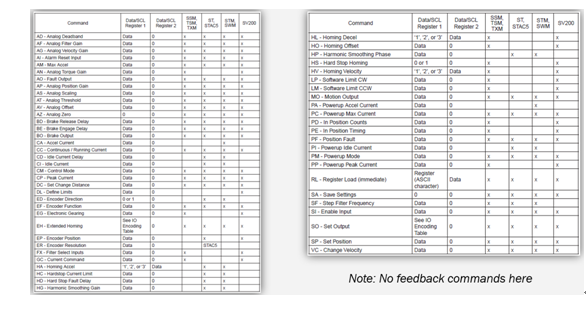
Opcode編碼可以直接查詢Host Command

注意:
AC、DE的單位 10rev/s/s
VE的單位 0.25rev/m
Type2 Message Format
報(bào)文格式: